For our first group project, we were tasked with building a lego sumo robot that would participate in a fight against other groups creations; it had to be fully automated, programmed using the Lego Mindstorms EV3 software.
We started off by looking at designs of other lego sumo robots online, basing ours off of it. We began to put the pieces together, working around the rechargeable battery pack.
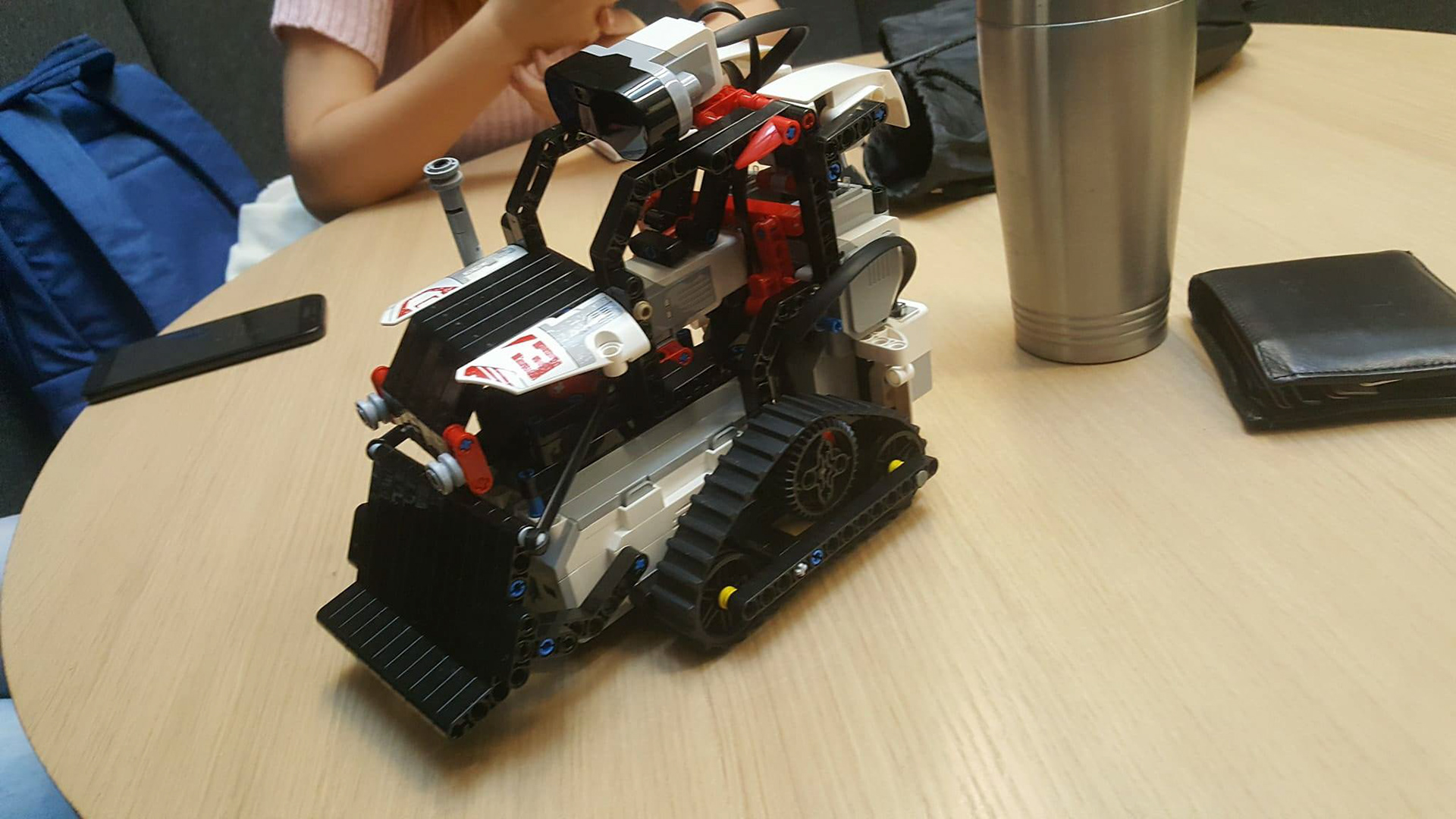
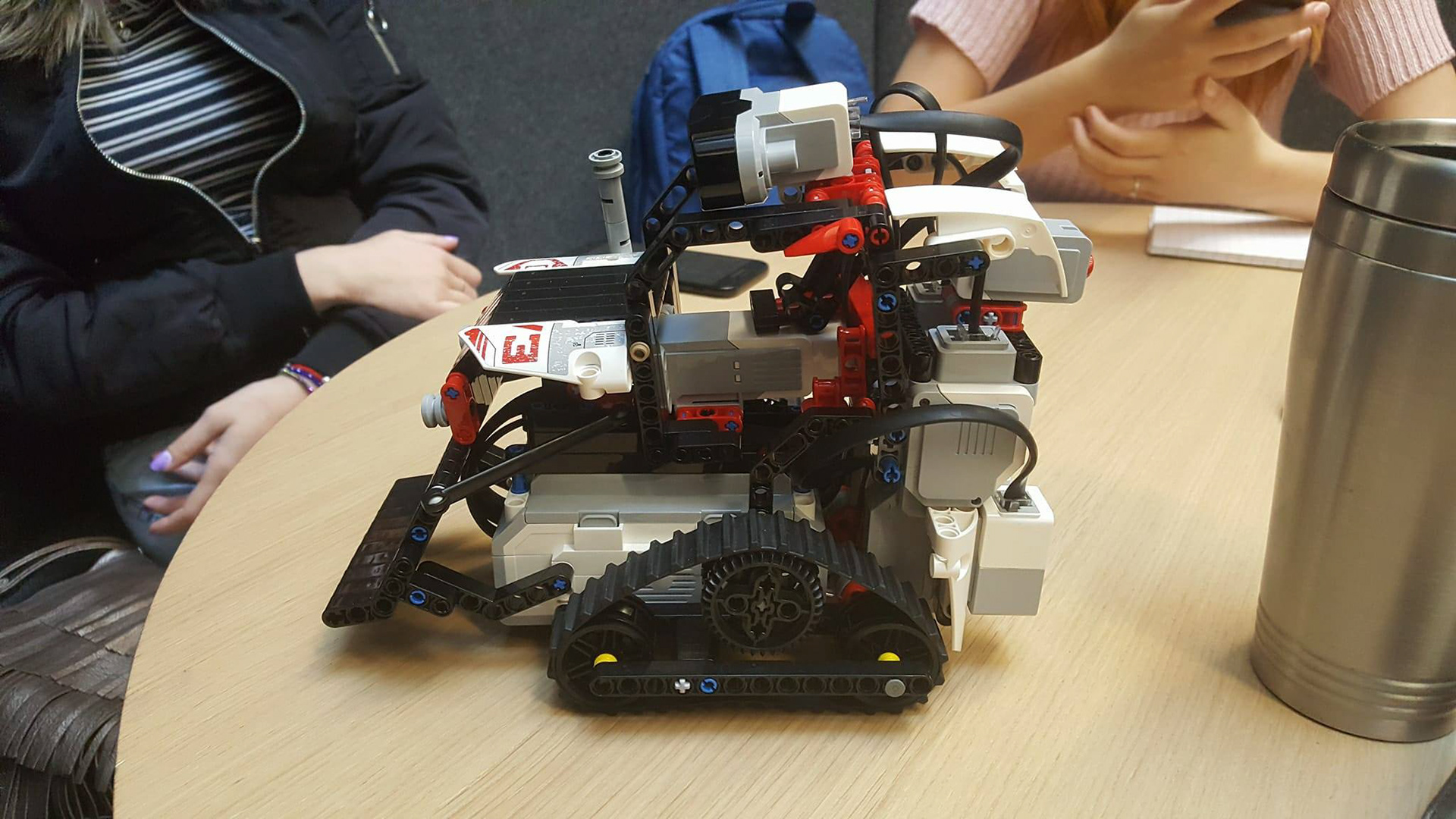
We decided to alter the design, moving the colour sensor closer to the front. This allowed for the robot to detect if and when it was about to drive itself out of the arena, permitting the ability to take counteractive measures to prevent this, stopping and reversing away.
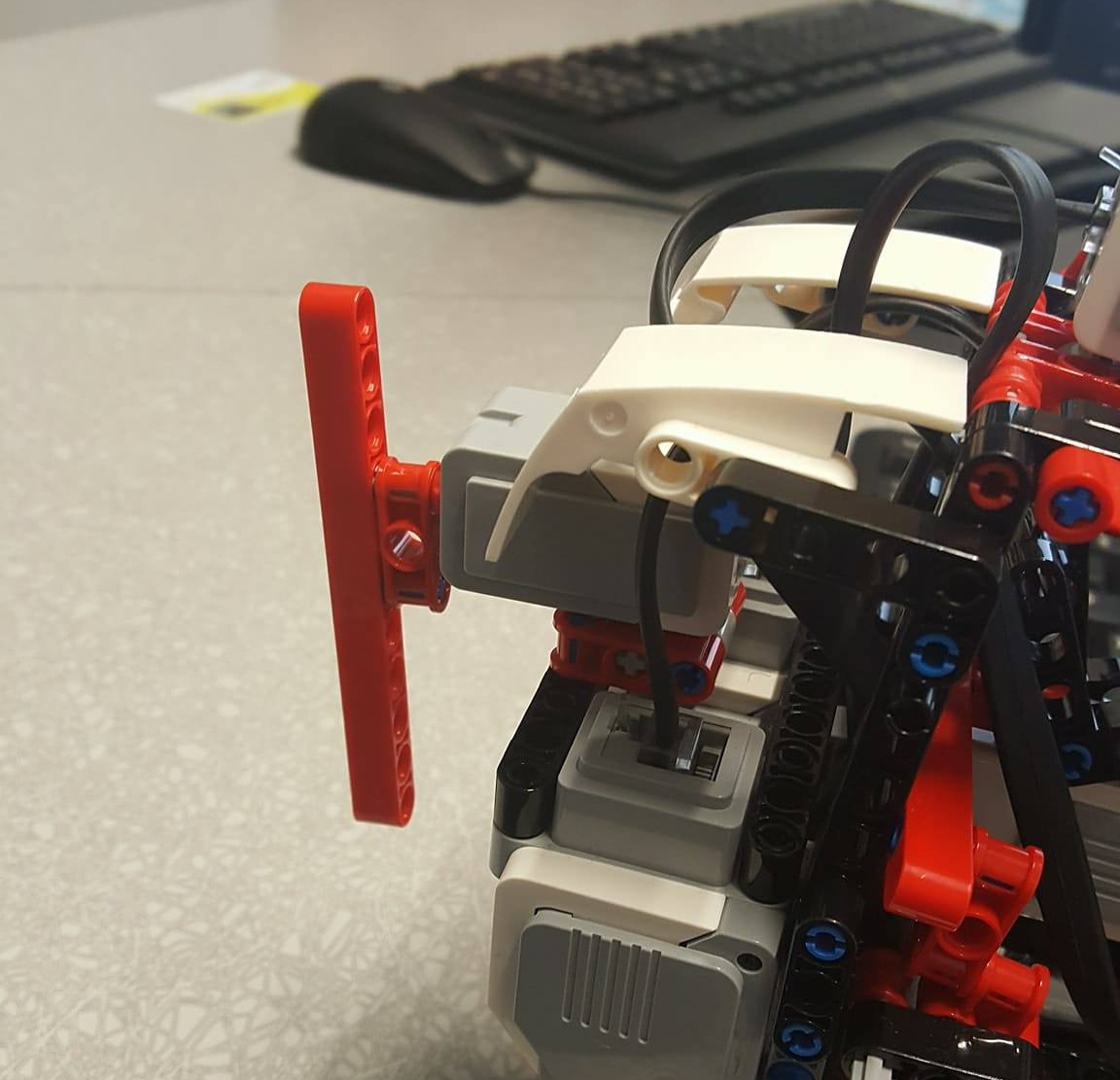
We also added a little lego bar to the back of the touch sensor to improve the chance of detection of a robot that is about to start pushing the robot out of the arena from behind.
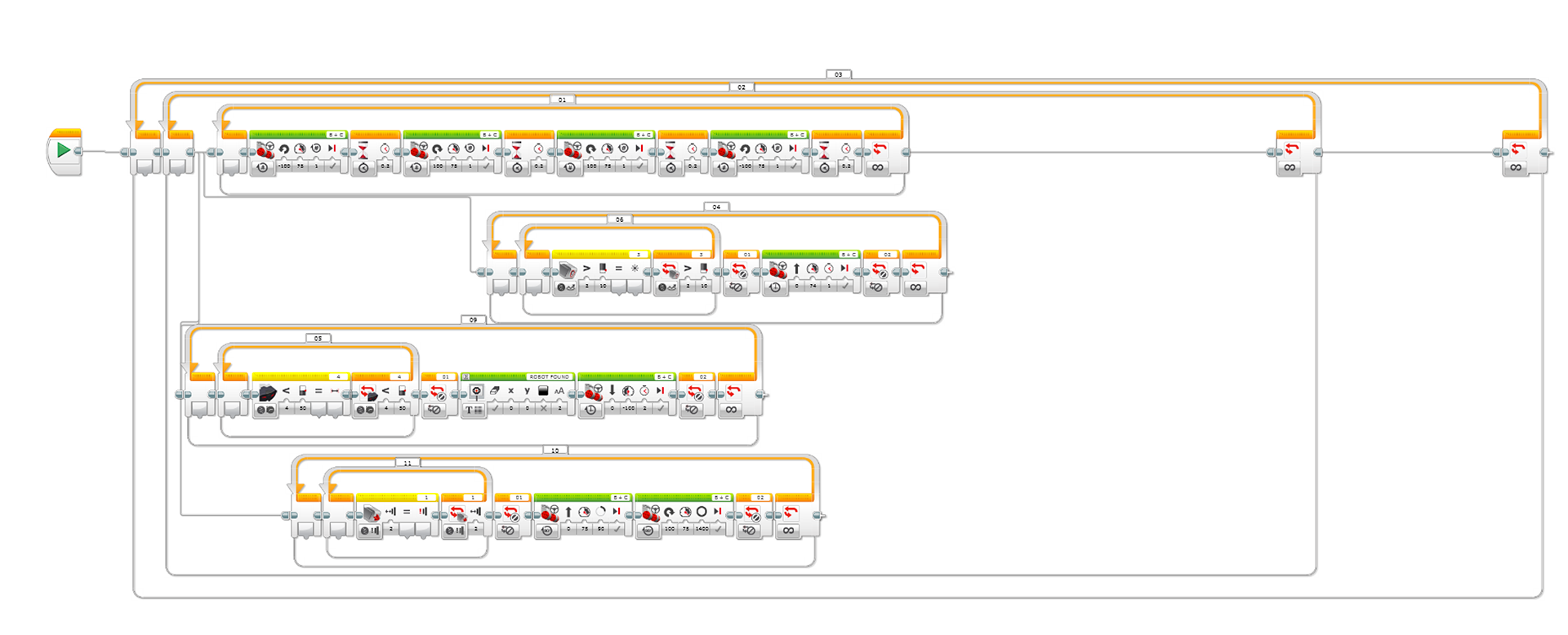
To code the robot we used the Lego Mindstorms EV3 software which is icon-based, drag and drop programming. We started out by each individually programming separate sections of the code and then combining it into one big piece of code that was ported and loaded onto the robot's brick via USB.
We ran into some issues in regards to making the robot stop when it was about to exit the arena due to the nature of the software. This was eventually solved. The robot was able to detect the presence of the rival bot using the infrared sensor, spinning around to find it before driving full-speed at the rival bot. We were able to program the display to show messages based on its movement too, as well as play sounds.
Overall, I would call the project a success. We came second in the competition, mainly due to the fact that the robots were placed directly in front of one another in the arena, and most of the rivals were simply programmed to drive forward at full-speed, without the ability to search out other bots, should this have been changed, with maybe a bigger arena, I believe we would have came in first place.